机器人
检测装置:是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信号送至控制器,形成闭环控制。一类是外部信息传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机器人的工作精度。

工业机器人技术原理
关键技术包括:(1)开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。

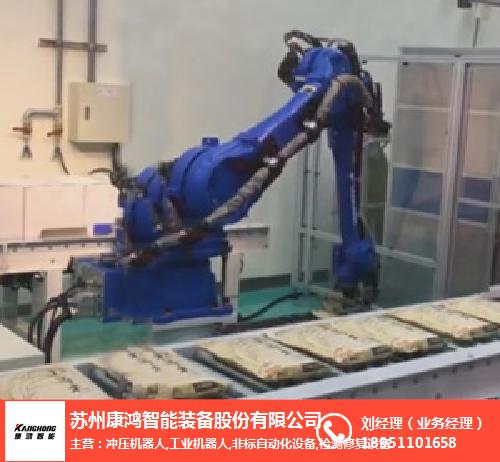
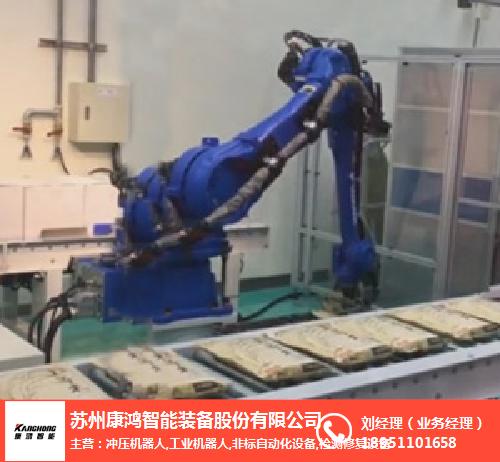
冲压机器人的功能:
苏州康鸿智能装备股份有限公司拥有三大产业事业部,高精密检测装备事业部、机器人(小冲机器人与AGV)事业部、非标自动化事业部,欢迎来电咨询!
冲压机器人适配于市面上所有类型的冲压设备:齿轮冲床、气动冲床、油压机,并做到无论吨位大小、机台高低,都可随意连接,实现设备自由组合。机器人系列产品已形成高度标准化,只须定制抓手,安装便捷,交付三天量产,使用操作简单、人机界面能识别双料,防止模具或冲床误动作,是代替人工冲压的理想产品。





 广告
广告