机械手可以减省工人、提{gx}率、降低成本、提高产品品质、安全性好、提升工厂形象。
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
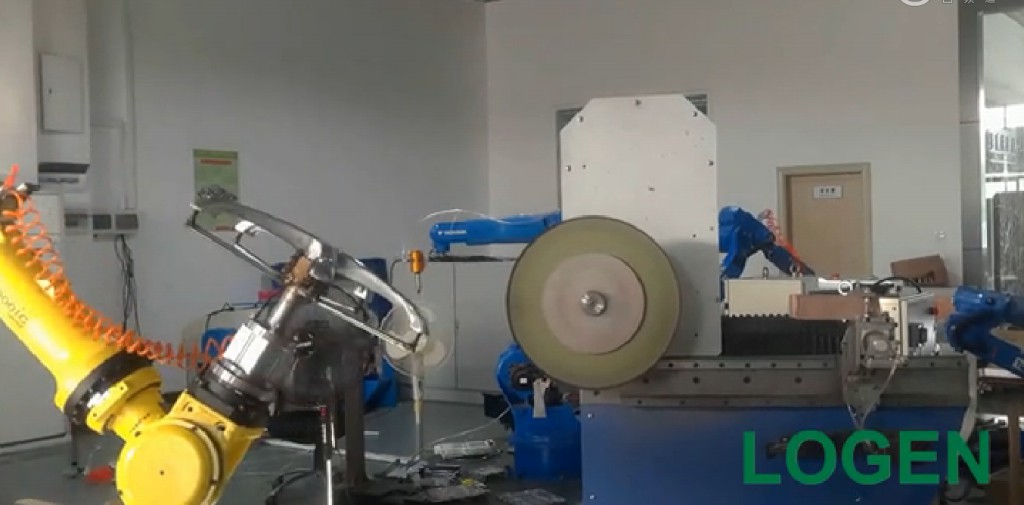
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、五金、电子、能等部门。
控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。
多关节机械手的优点是:动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作.随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。
多关节手臂也突破了传统的概念,其关节数量可以从三个到十几个甚至更多,其外形也不局限于像人的手臂,而根据不同的场合有所变化,多关节手臂的优良性能是单关节机械手所不能比拟的。




 广告
广告